Robô Autônomo Desafia Limites e Realiza Cirurgia Complexa Sozinho
- 18 de jul. de 2025
- 3 min de leitura

Pesquisadores desenvolveram um robô cirurgião que consegue realizar, de forma totalmente autônoma, etapas completas de uma cirurgia comum, a retirada da vesícula biliar, sem ajuda humana. Usando um sistema inteligente dividido em dois níveis (um para planejar e outro para executar os movimentos), o robô conseguiu se adaptar a imprevistos e operar com 100% de sucesso em testes com tecidos reais. Esse avanço aproxima a medicina da possibilidade de cirurgias autônomas mais seguras e eficientes no futuro.
A ideia de cirurgias feitas por robôs de forma autônoma, ou seja, sem o controle direto de um médico a cada passo, tem despertado muito interesse na medicina moderna. No entanto, a maioria das pesquisas nessa área até agora tem se concentrado apenas em automatizar tarefas simples, como cortar ou costurar, dentro de ambientes controlados e previsíveis.
O grande desafio é que, na vida real, uma cirurgia é muito mais complexa: ela exige movimentos delicados, decisões rápidas e a capacidade de se adaptar a variações naturais dos tecidos do corpo humano, que podem mudar de pessoa para pessoa ou até durante a operação.
Essas situações são difíceis de resolver com os métodos de aprendizado de máquina tradicionais, que normalmente seguem um padrão fixo ou dependem de regras lógicas rígidas.
Para tentar resolver esse problema, os pesquisadores desenvolveram uma nova forma de organização chamada estrutura hierárquica. Essa estrutura divide a responsabilidade do robô em dois níveis: um “cérebro” de alto nível que planeja os passos da cirurgia como um todo, e um “corpo” de baixo nível que executa os movimentos detalhados com precisão.

O nível mais alto funciona quase como um navegador que dá instruções claras para o nível mais baixo seguir, incluindo como corrigir o curso se algo sair errado. O planejamento desse nível superior é feito com o uso de linguagem, o que permite criar comandos mais flexíveis e compreensíveis, como se o robô estivesse sendo instruído em tempo real de forma semelhante à humana.
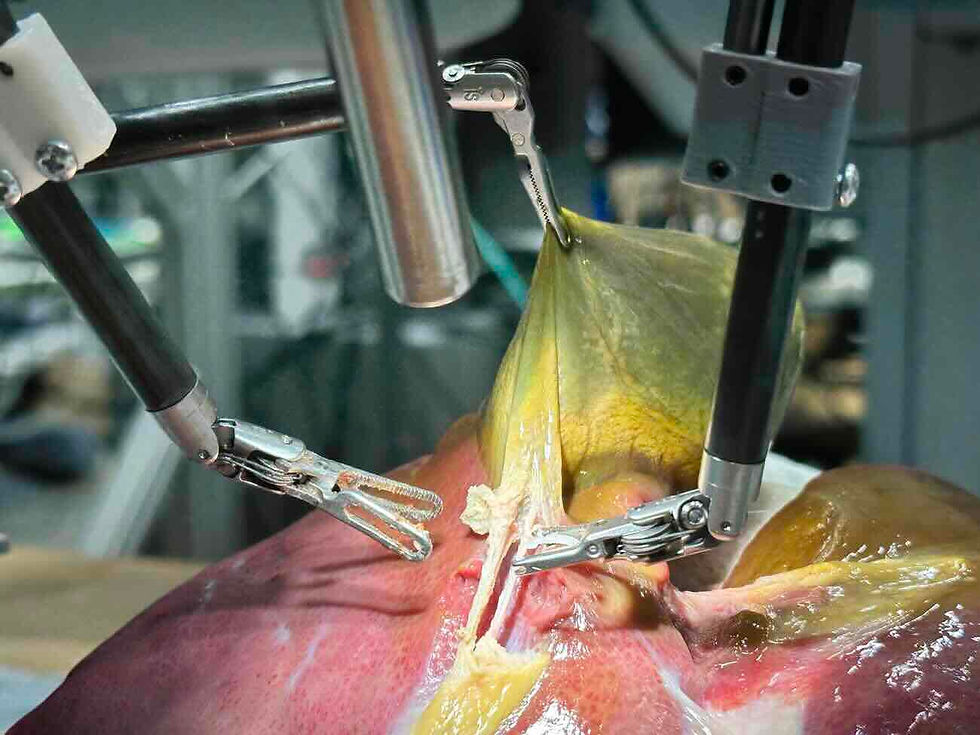
Para testar se esse sistema realmente funciona, os cientistas da Johns Hopkins University, USA, aplicaram a técnica em uma colecistectomia, que é a remoção da vesícula biliar, um dos procedimentos cirúrgicos minimamente invasivos mais comuns.
Os testes foram realizados em tecidos reais (mas fora do corpo, chamados de "ex vivo") de oito vesículas biliares diferentes. O robô conseguiu realizar todas as cirurgias sozinho, com uma taxa de sucesso de 100%, sem precisar de qualquer interferência humana.
Além disso, os pesquisadores fizeram testes para remover partes do sistema e ver como isso afetava o desempenho, confirmando que cada componente tinha um papel essencial na eficiência geral.
A grande vantagem dessa abordagem hierárquica é que ela permite ao robô lidar melhor com imprevistos, algo que é inevitável em um ambiente cirúrgico real, cheio de variações e mudanças inesperadas.
Ao demonstrar que o robô pode realizar etapas inteiras de um procedimento cirúrgico de forma autônoma, este trabalho representa um avanço importante no caminho para que cirurgias robóticas autônomas se tornem uma realidade em hospitais no futuro. Para o próximo passo, a equipe gostaria de treinar e testar o sistema em mais tipos de cirurgias e expandir suas capacidades para realizar uma cirurgia autônoma completa.
ASSISTA O ROBO OPERANDO AQUI: https://www.youtube.com/watch?v=pYkuVygd-0o
LEIA MAIS:
SRT-H: A hierarchical framework for autonomous surgery via language-conditioned imitation learning
JI WOONG (BRIAN) KIM, JUO-TUNG CHEN, PASCAL HANSEN, LUCY XIAOYANG SHI, ANTONY GOLDENBERG, SAMUEL SCHMIDGALL, PAUL MARIA SCHEIKL, ANTON DEGUET, BRANDON M. WHITE, DE RU TSAI, RICHARD JAEPYEONG CHA, JEFFREY JOPLING, CHELSEA FINN, AND AXEL KRIEGER
SCIENCE ROBOTICS. 9 Jul 2025. Vol 10, Issue 104
DOI: 10.1126/scirobotics.adt5254
Abstract:
Research on autonomous surgery has largely focused on simple task automation in controlled environments. However, real-world surgical applications demand dexterous manipulation over extended durations and robust generalization to the inherent variability of human tissue. These challenges remain difficult to address using existing logic-based or conventional end-to-end learning strategies. To address this gap, we propose a hierarchical framework for performing dexterous, long-horizon surgical steps. Our approach uses a high-level policy for task planning and a low-level policy for generating low-level trajectories. The high-level planner plans in language space, generating task-level or corrective instructions that guide the robot through the long-horizon steps and help recover from errors made by the low-level policy. We validated our framework through ex vivo experiments on cholecystectomy, a commonly practiced minimally invasive procedure, and conducted ablation studies to evaluate key components of the system. Our method achieves a 100% success rate across eight different ex vivo gallbladders, operating fully autonomously without human intervention. The hierarchical approach improved the policy’s ability to recover from suboptimal states that are inevitable in the highly dynamic environment of realistic surgical applications. This work demonstrates step-level autonomy in a surgical procedure, marking a milestone toward clinical deployment of autonomous surgical systems.



Comentários