Autonomous Robot Defies Limits And Performs Complex Surgery Alone
- Jul 18, 2025
- 3 min read

Researchers have developed a surgical robot that can fully autonomously perform complete steps of a common surgery, such as gallbladder removal, without human assistance. Using an intelligent system divided into two levels (one for planning and the other for executing movements), the robot was able to adapt to unexpected situations and perform with 100% success in tests with real tissue. This advancement brings medicine closer to the possibility of safer and more efficient autonomous surgeries in the future.
The idea of surgeries performed autonomously by robots, that is, without the direct control of a physician at every step, has sparked considerable interest in modern medicine. However, most research in this area has so far focused solely on automating simple tasks, such as cutting or sewing, within controlled and predictable environments.
The major challenge is that, in real life, surgery is much more complex: it requires delicate movements, quick decisions, and the ability to adapt to natural variations in human body tissues, which can change from person to person or even during the operation.
These situations are difficult to solve with traditional machine learning methods, which typically follow a fixed pattern or rely on rigid logical rules.
To address this problem, researchers developed a new organizational structure called a hierarchical structure. This structure divides the robot's responsibilities into two levels: a high-level "brain" that plans the overall surgical steps, and a low-level "body" that executes the detailed movements with precision.

The higher level functions almost like a navigator, providing clear instructions for the lower level to follow, including how to correct course if something goes wrong. This higher level is planned using language, which allows for more flexible and understandable commands, as if the robot were receiving real-time, human-like instructions.
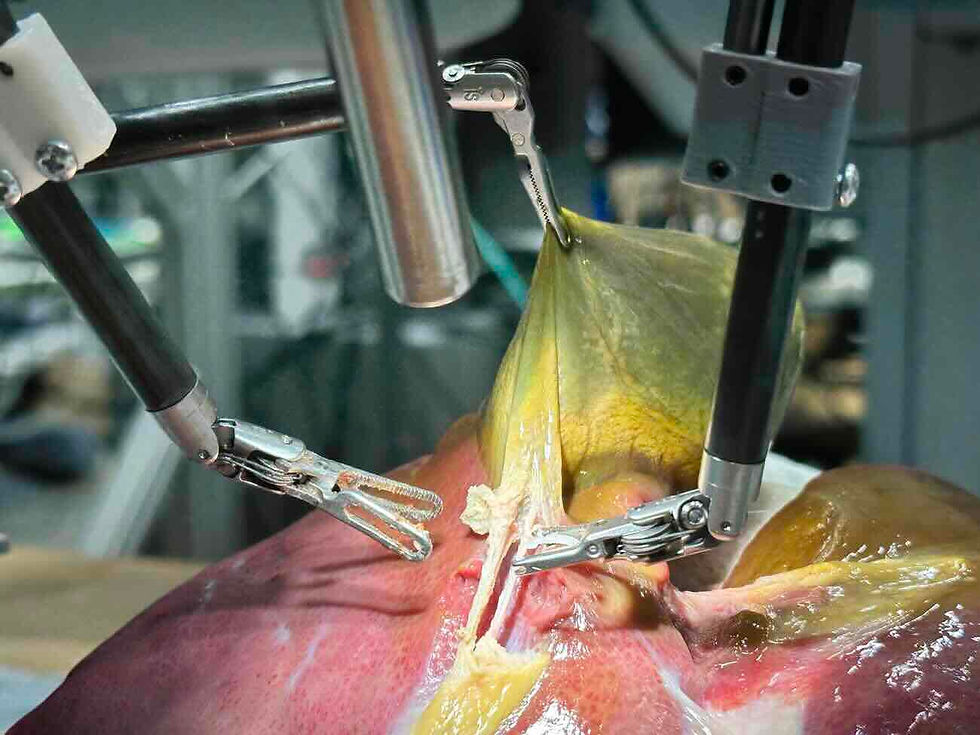
To test whether this system actually works, scientists at Johns Hopkins University, USA, applied the technique to a cholecystectomy, the removal of the gallbladder, one of the most common minimally invasive surgical procedures.
The tests were performed on real tissue (but outside the body, called "ex vivo") from eight different gallbladders. The robot was able to perform all the surgeries on its own, with a 100% success rate, without any human intervention.
Additionally, the researchers tested removing parts of the system to see how this affected performance, confirming that each component played a key role in overall efficiency.
The key advantage of this hierarchical approach is that it allows the robot to better handle unexpected situations, something that is inevitable in a real surgical environment, full of variations and unexpected changes.
By demonstrating that the robot can perform entire stages of a surgical procedure autonomously, this work represents an important step forward in making autonomous robotic surgeries a reality in hospitals in the future. As a next step, the team would like to train and test the system on more types of surgeries and expand its capabilities to perform complete autonomous surgery.
WATCH HERE: https://www.youtube.com/watch?v=pYkuVygd-0o
READ MORE:
SRT-H: A hierarchical framework for autonomous surgery via language-conditioned imitation learning
JI WOONG (BRIAN) KIM, JUO-TUNG CHEN, PASCAL HANSEN, LUCY XIAOYANG SHI, ANTONY GOLDENBERG, SAMUEL SCHMIDGALL, PAUL MARIA SCHEIKL, ANTON DEGUET, BRANDON M. WHITE, DE RU TSAI, RICHARD JAEPYEONG CHA, JEFFREY JOPLING, CHELSEA FINN, AND AXEL KRIEGER
SCIENCE ROBOTICS. 9 Jul 2025. Vol 10, Issue 104
DOI: 10.1126/scirobotics.adt5254
Abstract:
Research on autonomous surgery has largely focused on simple task automation in controlled environments. However, real-world surgical applications demand dexterous manipulation over extended durations and robust generalization to the inherent variability of human tissue. These challenges remain difficult to address using existing logic-based or conventional end-to-end learning strategies. To address this gap, we propose a hierarchical framework for performing dexterous, long-horizon surgical steps. Our approach uses a high-level policy for task planning and a low-level policy for generating low-level trajectories. The high-level planner plans in language space, generating task-level or corrective instructions that guide the robot through the long-horizon steps and help recover from errors made by the low-level policy. We validated our framework through ex vivo experiments on cholecystectomy, a commonly practiced minimally invasive procedure, and conducted ablation studies to evaluate key components of the system. Our method achieves a 100% success rate across eight different ex vivo gallbladders, operating fully autonomously without human intervention. The hierarchical approach improved the policy’s ability to recover from suboptimal states that are inevitable in the highly dynamic environment of realistic surgical applications. This work demonstrates step-level autonomy in a surgical procedure, marking a milestone toward clinical deployment of autonomous surgical systems.



Comments